Another widely used approach for prediction in nonlinear settings is the method of random forests.
Relevant reading:
Please read: James et al. (2021) or James et al. (2023)Chapter 8 “Tree-Based Methods”
Specifically:
Section 8.1 The Basics of Decision Trees
Section 8.2.1 Bagging
Section 8.2.2 Random Forests
Stochastic vs. algorithmic models
Two cultures in statistical modelling: stochastic vs. algorithmic models
Classic discussion paper by Leo Breiman (2001): Statistical modeling: the two cultures. Statistical Science 16:199–231. https://doi.org/10.1214/ss/1009213726
This paper has recently be revisited in the following discussion paper by Efron (2020) and discussants: Prediction, estimation, and attribution. JASA 115:636–677. https://doi.org/10.1080/01621459.2020.1762613
Random forests
Proposed by Leo Breimann in 2001 as application of “bagging” (Breiman 1996) to decision trees.
Basic idea:
A single decision tree is unreliable and unstable (weak predictor/classifier).
Use boostrap to generate multiple decision trees (=“forest”)
Average over predictions from all tree (=“bagging”, bootstrap aggregation)
The averaging procedure has the effect of variance stabilisation. Intringuingly, averaging across all decision trees dramatically improves the overall prediction accuracy!
The Random Forests approach is an example of an ensemble method (since it is based on using an “ensemble” of trees).
Assume: \[
\boldsymbol z=\begin{pmatrix}
\boldsymbol z_1 \\
\boldsymbol z_2 \\
\end{pmatrix}
\] with \[
\boldsymbol \mu=\begin{pmatrix}
\boldsymbol \mu_1 \\
\boldsymbol \mu_2 \\
\end{pmatrix}
\] and \[
\boldsymbol \Sigma=\begin{pmatrix}
\boldsymbol \Sigma_{1} & \boldsymbol \Sigma_{12} \\
\boldsymbol \Sigma_{12}^T & \boldsymbol \Sigma_{2} \\
\end{pmatrix}
\] with corresponding dimensions \(d_1\) and \(d_2\) and \(d_1+d_2=d\).
Marginal distributions:
Any subset of \(\boldsymbol z\) is also multivariate normally distributed. Specifically, \[
\boldsymbol z_1 \sim N_{d_1}(\boldsymbol \mu_1, \boldsymbol \Sigma_{1})
\] and \[
\boldsymbol z_2 \sim N_{d_2}(\boldsymbol \mu_2, \boldsymbol \Sigma_{2})
\]
Conditional multivariate normal:
The conditional distribution is also multivariate normal: \[
\boldsymbol z_1 | \boldsymbol z_2 = \boldsymbol z_{1 | 2} \sim N_{d_1}(\boldsymbol \mu_{1|2}, \boldsymbol \Sigma_{1 | 2})
\] with \[\boldsymbol \mu_{1|2}=\boldsymbol \mu_1 + \boldsymbol \Sigma_{12} \boldsymbol \Sigma_{2}^{-1} (\boldsymbol z_2 -\boldsymbol \mu_2)\] and \[\boldsymbol \Sigma_{1 | 2}=\boldsymbol \Sigma_{1} - \boldsymbol \Sigma_{12} \boldsymbol \Sigma_{2}^{-1} \boldsymbol \Sigma_{12}^T\]
\(\boldsymbol z_{1 | 2}\) and \(\boldsymbol \mu_{1|2}\) have dimension \(d_1 \times 1\) and \(\boldsymbol \Sigma_{1 | 2}\) has dimension \(d_1 \times d_1\), i.e. the same dimension as the unconditioned variables.
You may recall the above formula in the context of linear regression, with \(y = z_1\) and \(\boldsymbol x= \boldsymbol z_2\) so that the conditional mean becomes \[
\begin{split}
\text{E}(y|\boldsymbol x) &=\boldsymbol \mu_y + \boldsymbol \Sigma_{y\boldsymbol x} \boldsymbol \Sigma_{\boldsymbol x}^{-1} (\boldsymbol x-\boldsymbol \mu_{\boldsymbol x})\\
&= \beta_0+ \boldsymbol \beta^T \boldsymbol x\\
\end{split}
\] with \(\boldsymbol \beta= \boldsymbol \Sigma_{\boldsymbol x}^{-1} \boldsymbol \Sigma_{\boldsymbol xy}\) and \(\beta_0 = \boldsymbol \mu_y-\boldsymbol \beta^T \boldsymbol \mu_{\boldsymbol x}\), and the corresponding conditional variance is \[
\text{Var}(y|\boldsymbol x) = \sigma^2_y - \boldsymbol \Sigma_{y\boldsymbol x} \boldsymbol \Sigma_{\boldsymbol x}^{-1} \boldsymbol \Sigma_{\boldsymbol xy} \,.
\]
Covariance functions and kernels
The GP prior is an infinitely dimensional multivariate normal distribution with mean zero and the covariance specified by a function\(k(x, x^{\prime})\):
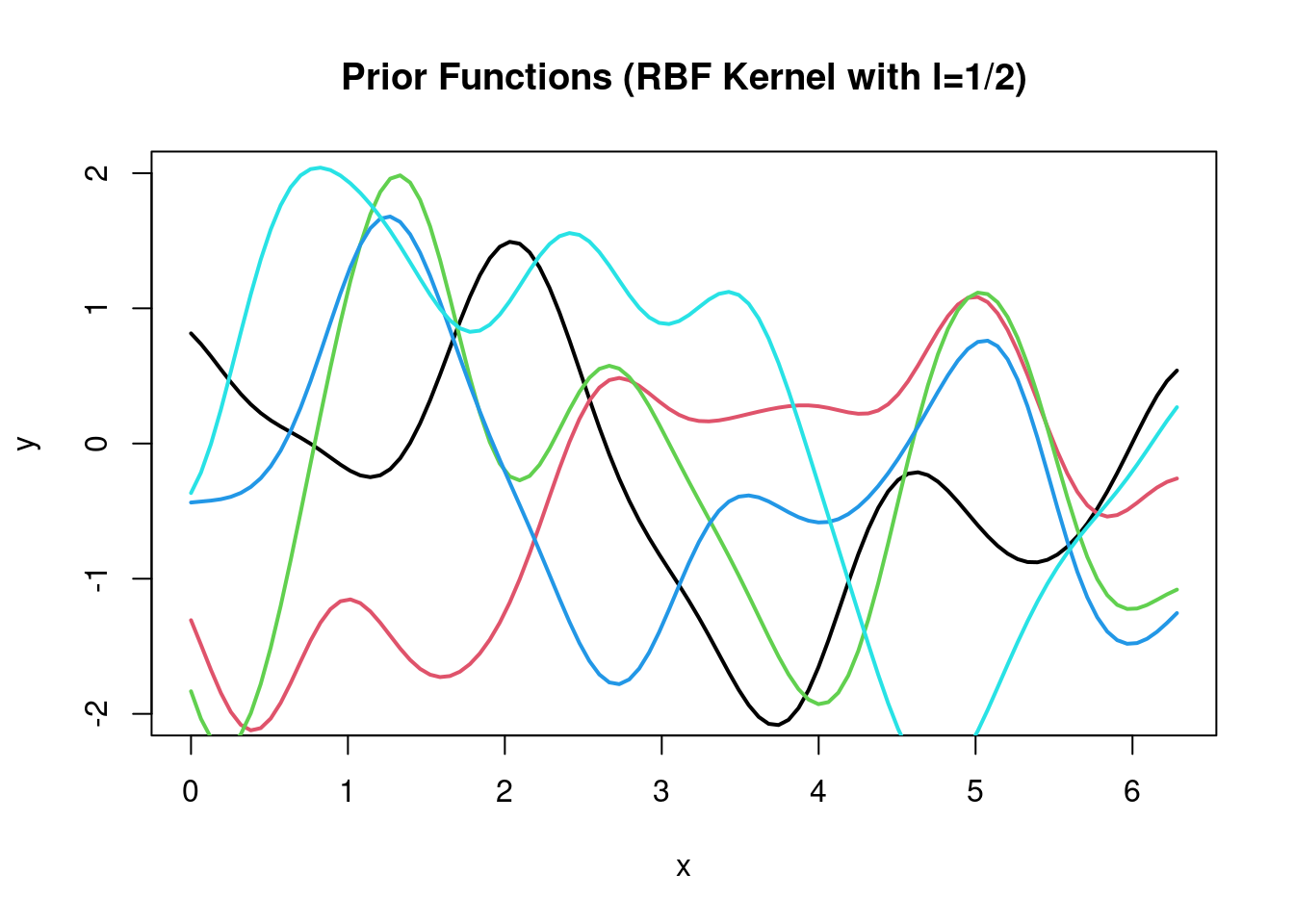
A widely used covariance function is \[
k(x, x^{\prime}) = \text{Cov}(x, x^{\prime}) = \sigma^2 e^{-\frac{ (x-x^{\prime})^2}{2 l^2}}
\] This is known as the squared-exponential kernel or Radial-basis function (RBF) kernel.
The parameter \(l\) in the RBF kernel is the length scale parameter and describes the “wigglyness” or “stiffness” of the resulting function. Small values of \(l\) correspond to more complex, more wiggly functions, and to low spatial correlation, as the correlation decreases quicker with distance, and large values correspond to more rigid, stiffer functions, with longer range spatial correlation (note that in a time series context this would be called autocorrelation).
There are many other kernel functions, including linear, polynomial or periodic kernels.
GP model
Nonlinear regression in the GP approach is conceptually very simple:
start with multivariate prior
then condition on the observed data
the resulting conditional multivariate normal can used to predict the function values at any unobserved values
the conditional variance can be used to compute credible intervals for predictions.
GP regression also provides a direct link with classical Bayesian linear regression (when using a linear kernel). Furthermore, GPs are also linked with neural networks as their limit in the case of an infinitely wide network (see section on neural networks).
Drawbacks of GPs: computationally expensive, typically \(O(n^3)\) because of the matrix inversion. However, there are now variations of GPs that help to overcome this issue (e.g. sparse GPs).
Gaussian process example
We now show how to apply Gaussian processes in R justing using standard matrix calculations.
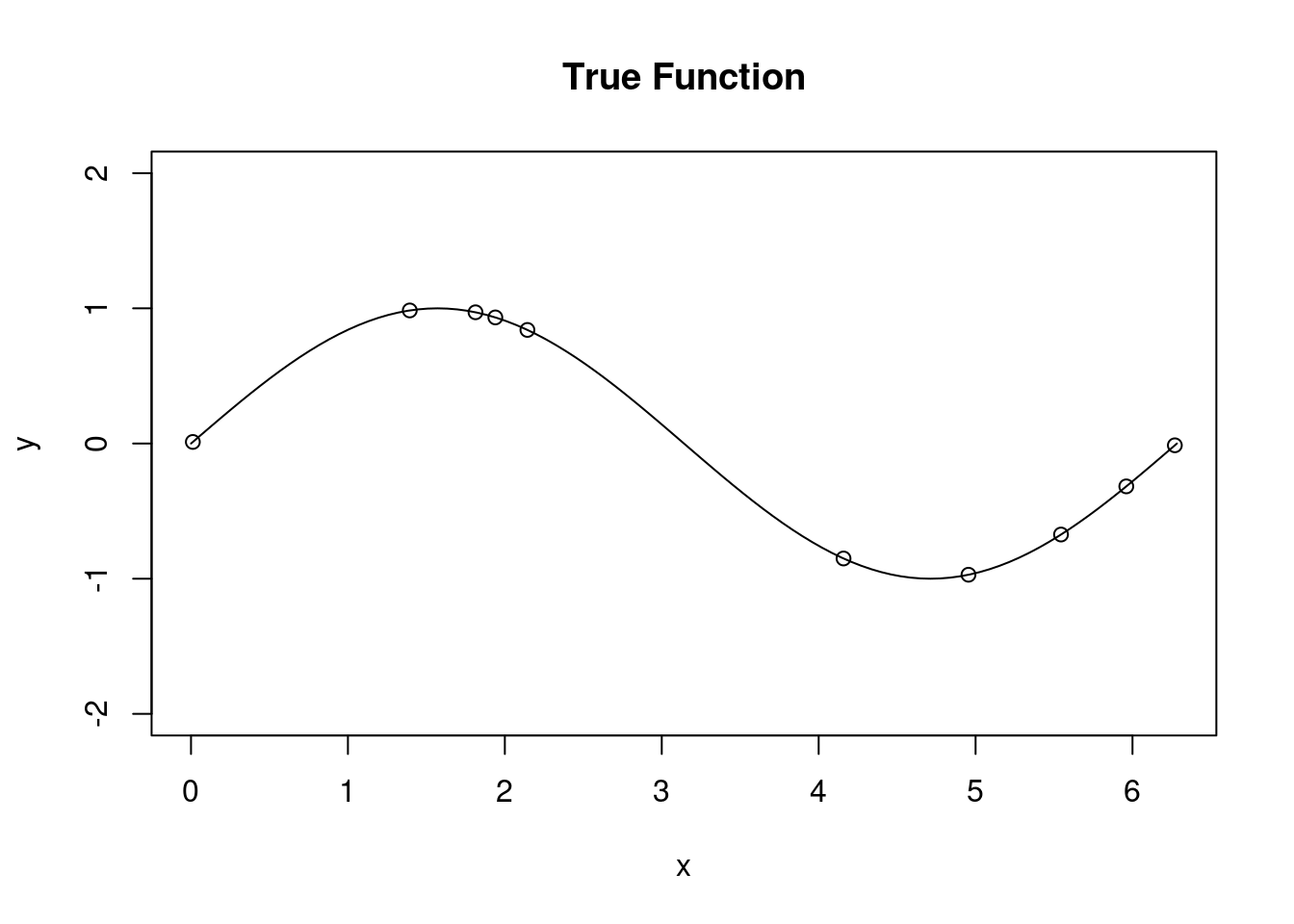
Our aim is to estimate the following nonlinear function from a number of observations. Note that initially we assume that there is no additional noise (so the observations lie directly on the curve):
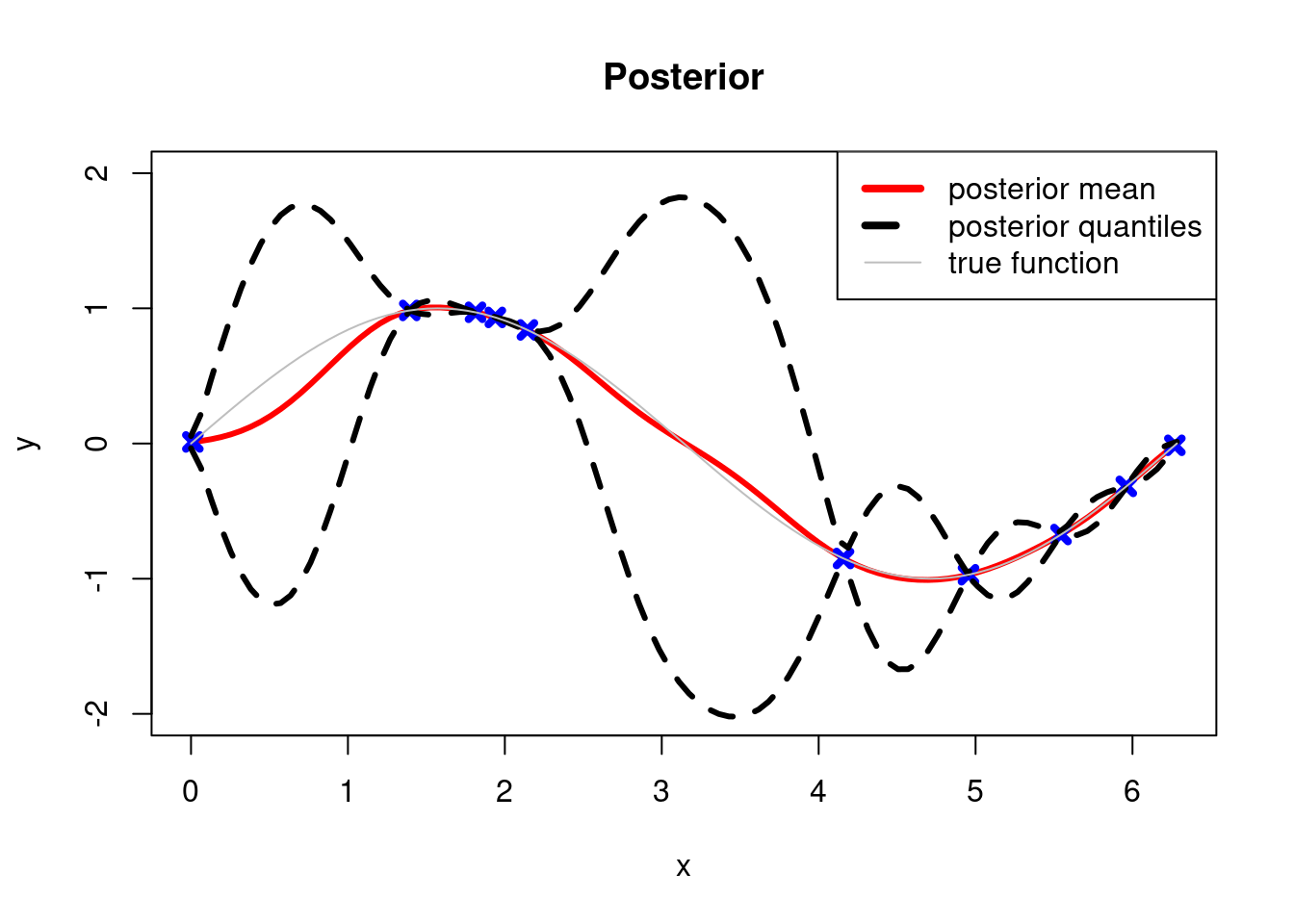
Note that in the vicinity of data points the CIs are small and the further away from data the more uncertain the estimate of the underlying function becomes.
7.3 Neural networks
Another highly important class of models for nonlinear prediction (and nonlinear function approximation) are neural networks.
Relevant reading:
Please read: James et al. (2021) or James et al. (2023)Chapter 10 “Deep Learning”
History
Neural networks are actually relatively old models, going back to the 1950s.
Three phases of neural networks (NN)
1950/60: replicating functions of neurons in the brain (e.g. perceptron)
The first phase was biologically inspired, the second phase focused on mathematical properties, and the current phase is pushed forward by advances in computer science and numerical optimisation:
Neural networks are essentially stacked systems of linear regressions, with nonlinear mappings between each layer, mapping the input to output via one or more layers of internal hidden nodes corresponding to internal latent variables:
Each internal node is a nonlinear function of all or some of nodes in the previous layer
Typically, the output of a node is computed using a non-linear activation function, such as the sigmoid function or a piecewise linear function (ReLU), from a linear combination of the input variables of that node.
A simple architecture is a feedforward network with a single hidden layer. More complex models are multilayer perceptrons and convolutional neural networks.
It can be shown that even simple network architectures can (with sufficient number of nodes) approximate any arbitrary non-linear function. This is called the universal function approximation property.
“Deep” neural networks have many layers, and the optimisation of their parameters requires advanced techniques (see above), with the objective function typically an empirical risk based on, e.g., squared error loss or cross-entropy loss. Neural networks are very highly parametrised models and therefore require lots of data for training, and typically also some form of regularisation (e.g. dropout).
As an extreme example, the neural network behind the ChatGPT 4 language model that is trained on essentially the whole freely accessible text available on the internet has an estimated 1.76 trillion (!) parameters (\(1.76 \times 10^{12}\)).
In the limit of an infinite width a single layer fully connected neural network becomes equivalent to a Gaussian process. This was first shown by R. M. Neal (1996)1. More recently, this equivalence has also been demonstrated for other types of neural networks (with the kernel function of the GP being determined by the neural network architecture). This is formalised in the “neural tangent kernel” (NTK) framework.
Some of the statistical aspects of neural networks are not well understood. For example, there is the paradox that neural networks typically overfit the training data but still generalise well - this clearly violates the traditional understanding of bias-variance tradeoff for classical modelling in statistics and machine learning — see for example Belkin et al. (2019)2. Some researchers argue that this contradiction can be resolved by better understanding the effective dimension of complex models. There is a lot of current research to explain this phenomenon of “multiple descent”, i.e. the decrease of prediction error for models with very many parameters. A further topic is robustness of the predictions, which is also caused by overfitting. It is well known that neural networks can sometimes be “fooled” by so-called adversarial examples, e.g., the classification of a sample may change if a small amount of noise is added to the test data.
Learning more about deep learning
A good place to learn more about the concepts of deep learning is the book “Understanding Deep Learning” by Prince (2023) available online at https://udlbook.github.io/udlbook/. For actual application in computer code using various software frameworks the book “Dive Into Deep Learning” by Zhang et al. (2023) available online at https://d2l.ai is recommended.
James, G., D. Witten, T. Hastie, and R. Tibshirani. 2021. An Introduction to Statistical Learning with Applications in R. 2nd ed. Springer. https://doi.org/10.1007/978-1-0716-1418-1.
James, G., D. Witten, T. Hastie, R. Tibshirani, and J. Taylor. 2023. An Introduction to Statistical Learning with Applications in Python. Springer. https://doi.org/10.1007/978-3-031-38747-0.
Belkin, M. et al. 2019. Reconciling modern machine-learning practice and the classical bias–variance trade-off. PNAS 116: 15849–15854. https://doi.org/10.1073/pnas.1903070116↩︎